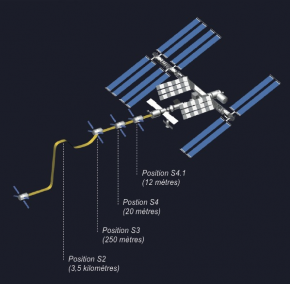
Pour tester ces équipements de façon optimale, l'ATV-5 devra se positionner face à son port d'amarrage de l'ISS plus tôt que d'habitude (dès qu'il sera en S2, à 3,5 km de distance).
Auparavant, cette approche se faisait en mode « yaw steering » (l'ATV « twistait » de dos au soleil pour pouvoir orienter ses panneaux vers lui et collecter de la puissance). Cette fois-ci, l'ATV avancera aligné en permanence avec le plan de l'orbite, en orientation « earth pointing ».
De ce fait, l'orientation de ses panneaux solaires ne sera pas toujours l'idéale (un panneau solaire génère un maximum de puissance électrique lorsque les rayons du soleil sont perpendiculaires à sa surface). Ils vont donc globalement collecter moins d'énergie que sur un rendez-vous classique, comme pour ATV-4.
Néanmoins, cette position « alignée » avec l'ISS s'avère indispensable pour expérimenter les caméras de l'ESA, par conséquent les opérateurs de l'équipe véhicule vont devoir puiser plus que d'habitude dans les batteries de l'ATV et gérer à la perfection la ressource énergétique collectée afin d'alimenter tous les sous-systèmes qui amèneront l'ATV à bon port.
Quelle est la différence entre « yaw steering » et « earth pointing » ?
Différence entre « yaw steering » et « earth pointing » from CNES on Vimeo.